
射流撞击斜面板
Overview
资料来源: 里卡多梅希亚-阿尔瓦雷斯和 Hussam Hikmat, 密歇根州立大学机械工程系, 东兰辛, MI
本实验的目的是通过将动压转化为静压来证明流体流动对结构的作用力。为此, 我们将使一个平面射流撞击平板, 并将测量由此产生的压力分布沿板块。由此产生的力将通过在压力分布和适当定义的板块表面的面积差之间进行积分来估计。这一实验将重复的两个角度的板块倾斜的方向的喷气和两个流速。每个配置都产生不同的压力分布沿板块, 这是不同水平的结果, 动态压力转换为静态压力在板的表面。
对于这个实验, 压力将测量与一个膜片压力传感器连接到一个扫描阀。该板本身有一个小穿孔称为压力水龙头, 通过软管连接到扫描阀。扫描阀将压力从这些水龙头传送到压力传感器一次。压力感应器转换成电压, 在膜片上产生机械偏转。这个电压与隔膜两侧的压差成正比。
Principles
在可忽略不计的引力势变化的稳态不可压缩流动中, 伯努利方程可以解释为两种能量形式的加法: 动能和压力势能。在一个无粘的过程中, 这些形式的能量可以自由地相互转换, 同时保持初始总能量恒定。这个能量总和叫做伯努利常数。为了方便起见, 伯努利方程可以用尺寸均匀性原理来表示压力维数 [3]。在这个维度变换下, 与动能相关的术语被称为 "动态压力", 与压力势能相关的术语叫做 "静压力", 而伯努利常数则称为 "停滞压力"。后者可以被解释为最大的压力, 流量将达到如果停止通过把所有的动态压力转化为静态压力。这些原理可以用伯努利方程的以下形式更好地描述:
 (1)
(1)
其中是静态压力, 是动态压力, 是停滞压力. 

 图 1 (a) 显示了当前实验的示意图。如图所示, 一架喷气机通过宽度为W的狭缝从更高压力的容器中退出, 并将L跨越到一个被称为接收器的较低压力的封闭空间。接收器是一个小房间, 用作实验的测试部分。它安置数据采集设备和实验。在流了一段距离后, 射流撞击到接收器内的一个平板, 使其与射流轴线夹角。图 1 (A) 中的 jet 由三流线来概括。中间流线把喷气机分成两个区域, 一个被偏转向上, 一个被向下偏转。由于分流流线不会偏转, 它就会停在墙上, 也就是所谓的停滞点。在这一点上, 所有的动态压力转换成静态压力和压力达到其最大水平,. 压力水平从停滞点减少, 因为动态压力逐渐减少变成静态压力。
图 1 (a) 显示了当前实验的示意图。如图所示, 一架喷气机通过宽度为W的狭缝从更高压力的容器中退出, 并将L跨越到一个被称为接收器的较低压力的封闭空间。接收器是一个小房间, 用作实验的测试部分。它安置数据采集设备和实验。在流了一段距离后, 射流撞击到接收器内的一个平板, 使其与射流轴线夹角。图 1 (A) 中的 jet 由三流线来概括。中间流线把喷气机分成两个区域, 一个被偏转向上, 一个被向下偏转。由于分流流线不会偏转, 它就会停在墙上, 也就是所谓的停滞点。在这一点上, 所有的动态压力转换成静态压力和压力达到其最大水平,. 压力水平从停滞点减少, 因为动态压力逐渐减少变成静态压力。
根据撞击角度 (图1中的), 停滞流线遵循不同的路径. 当时, jet 的中心线也是停滞流线.
当时, jet 的中心线也是停滞流线.  随着的减少, 停滞流线将从射流的中心线移开, 向着靠近射流外缘的轨迹移动. 由于 90o也是最大速度的轨迹, 因此最大动态压力, 其产生的停滞点将达到与其他轨道相比在较小的值的最大压力值. 总之, 撞击角对压力剖面的影响是降低其最大值, 并将其峰值移向靠近射流出口的板块区域。
随着的减少, 停滞流线将从射流的中心线移开, 向着靠近射流外缘的轨迹移动. 由于 90o也是最大速度的轨迹, 因此最大动态压力, 其产生的停滞点将达到与其他轨道相比在较小的值的最大压力值. 总之, 撞击角对压力剖面的影响是降低其最大值, 并将其峰值移向靠近射流出口的板块区域。
图 1 (A) 中的虚线表示沿暴露于射流的板表面的净压力分布。从图 1 (B) 中注意到, 板上的总压力, 即, 是增加周围的压力,, 加上撞击压力或超压,. 

 由于周围的压力是均匀分布的, 它抵消和板上的负荷是严格的结果, 超压。这种压力分布将通过实验确定, 并用于根据以下积分估计板上的净负荷:
由于周围的压力是均匀分布的, 它抵消和板上的负荷是严格的结果, 超压。这种压力分布将通过实验确定, 并用于根据以下积分估计板上的净负荷:
 (2)
(2)
由于实验数据是离散的, 这个积分可以估计使用梯形规则或辛普森的规则 [4]。
此外, 当流体通过孔或狭缝从高压区排出到较低压力区时, 发出的射流趋向于最初会聚到称为腔 contracta的区域 (参见图1以供参考), 然后发散尔后, 当它从放电口岸流动 [5]。实际上,腔 contracta是在 jet 离开其放电端口后的第一个位置, 其中的流线变为并行。因此, 这是沿射流的第一个地方, 静态压力等于周围环境的压力 [5]。在本实验中, 压腔是高压区, 接收器为低压区。此外, 内部的速度是微不足道的, 它可以被认为是停滞与非常好的逼近。因此, 方程 (1) 可用于确定腔收缩a 的速度, 如下所示:
 (3)
(3)
这里, 是压舱和接收器之间的压力差.  通常, 狭缝宽度和腔 contracta的收缩率非常接近 [5、6、7]:
通常, 狭缝宽度和腔 contracta的收缩率非常接近 [5、6、7]:
 (4)
(4)
因此, 质量流量可以从 (3) 和 (4) 估计如下:
 (5)
(5)
这里, 是 腔 contracta的区域。
腔 contracta的区域。

图1.基本配置示意图。一架喷气机通过宽度 W 的狭缝向接收器出口 。射流撞击倾斜的板块, 在表面施加压力载荷时会产生偏转 (虚线).请单击此处查看此图的较大版本.
Procedure
1. 设置设施
- 确保设施中没有流动。
- 根据图2中的示意图设置仪器。
- 将板调整为所需角度. 在表1中记录此值。
- 测量喷嘴宽度W.在表1中记录此值。
- 测量板跨度L.在表1中记录此值。
- 零压力传感器。
- 注意压力传感器的校准常数, mp (Pa/V)。在表1中记录此值。
- 将传感器的高压端口 (标记为 +) 连接到压舱的压力分路器 (标记为).

- 由于所有的操作都发生在接收器内, 所以将传感器的低压端口 (标记为-) 打开, 以感知接收器中的压力 ().
- 启动流量设备 (fll-)。
- 使用数字多米记录电压 (V) 与压力传感器所感测的接收器和接收机之间的压力差相关.
 在表2中记录此值。
在表2中记录此值。 - 使用校准常量 mp从1.7 确定压舱和接收器 () 之间的压力差.
 在表2中记录此值。
在表2中记录此值。

图2。数据采集系统的详细信息。设备连接示意图.请单击此处查看此图的较大版本.
表1。实验研究的基本参数。
| 参数 | 值 |
| 喷嘴宽度 (Wn) | 41.3 毫米 |
| 板跨度 (L) | 81.3 厘米 |
| 板高 (H) | 61cm |
| 传感器校准常数 (m_p) | 137.6832 Pa/五 |
2. 运行实验
- 将传感器 (标记为 +) 的高压端口连接到扫描阀的公共端口。将传感器的低压端口 (标记为-) 打开, 以感知接收器中的压力 ().
- 首页的扫描阀, 开始您的测量从第一个压力抽头位置。
- 运行遍历VI (LabView 虚拟仪器)。
- 在 VI. 中输入校准常量 mp
- 将采样率设置为 100 Hz, 并将样本总数设为 500 (即5秒的数据)。
- 在 VI 中输入压力水龙头的位置 (), 从中可以获取板压数据.
 考虑到压力水龙头的间距是25.4mm。因此, 该位置将为 mm, 其中是从0开始的分路器的索引.
考虑到压力水龙头的间距是25.4mm。因此, 该位置将为 mm, 其中是从0开始的分路器的索引. 

- 记录数据。VI 将读取压力抽头和接收器之间的压力差 (.

- 将扫描阀步到下一个分路位置。
- 重复步骤2.6 到 2.8, 直到所有的压力水龙头都被遍历。
- 最后, VI 提供了一个表和一个抽头位置与压力的图形。
- 停止 VI。
- 更改流控制板的位置, 以便将流区域大致关闭一半 (请参阅图 3以供参考)。这将修改流率。使用公式 (5) 来确定此流量的值。
- 对流量控制板的新位置重复步骤2.3 到2.11。
- 修改撞击板的角度, 并设置流量控制板的初始位置。
- 重复步骤2.3 至 2.14, 80o、70o、60o、50o和 45o。

图3。实验设置。测试部分。左: 在狭缝前面的撞击板。高压空气通过这个狭缝从压舱排出到接收器中。中间: 连接到撞击板的压力水龙头被分配到扫描阀中一次取样。右: 在接收器放电前的撞击板。放电有一个穿孔板来调节流速.请单击此处查看此图的较大版本.
3. 分析
- 对于每个倾角, 绘制两个流速的压力数据。
- 利用实验数据, 根据方程 (2) 对板上的力进行估计。
- 使用等式 (3) 确定腔 contracta的射流速度。
- 使用方程 (5) 估计质量流量。
Results
图 4显示了在两个不同角度和两个不同的流速下, 平面射流撞击平板所获得的四套结果。事实上, 由于传感器的低压侧向接收器打开, 所以它的读数只对应于超压, 这实际上是 图 4中所示的点。
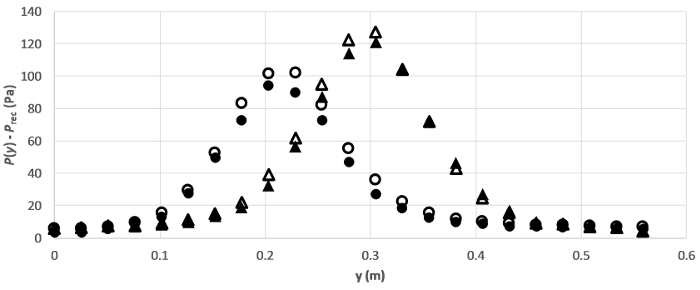
图4.代表性的结果。沿板的压力分布为两个角和两个流速。符号表示: 
 : , m/s;
: , m/s; 
 : ,
: ,  m/s;
m/s;
 : , m/s;:
: , m/s;:  , m/s
, m/s
根据图 4, 90o撞击的配置文件高于 70o撞击的轮廓。这种行为的原因是, 前一种情况下的停滞流线对应于流中心线, 即峰值速度和最大动态压力的流线。当冲击角减小时, 停滞流线从峰值速度线移开, 并从原来的路径弯曲。此效果在图 1(A) 中进行了草绘, 这也是压力剖面中的峰值压力从盘中心移开的原因。
正如预期的那样, 最大压力随流速 (图4中的闭合符号) 而减小, 因为在流动速率下降时, 动能普遍降低, 因此在动压下。这个最大压力实际上是停滞压力的措施,, 以前解释. 对于在 90o上撞击板的射流的情况, 这是对的精确测量, 因为压力抽头与中心线一致, 因此是射流的停滞流线. 但是, 如图1a 所示, 当撞击角减小时, 停滞流线会偏离原来的路径。在这种新的条件下, 没有保证这种流线将与压力水龙头在其撞击位置完全重合。因此, 在不同于 90o的撞击角上观测到的峰值压力只是对的近似值.
表2显示了两个不同撞击角和流速的实验测量结果。
Table2.代表结果.
| 参数 | 运行1 | 运行2 | 运行3 | 运行4 |
| 板角 (θ) | 90o | 90o | 70o | 70o |
| 数字多表读数 (E) | 2.44 V | 2.33 V | 2.44 V | 2.28 V |
| 压力差 (P_pl-P_rec) | 335.95 Pa | 320.80 Pa | 335.95 Pa | 313.92 Pa |
| 腔 contracta 速度 (V_VC) | 10.14 米/秒 | 9.91 米/秒 | 10.14 米/秒 | 9.81 米/秒 |
| 质量流量 (m))#̇ | 0.254 公斤/秒 | 0.249 公斤/秒 | 0.254 公斤/秒 | 0.246 公斤/秒 |
| 停滞压力 (P_o) | 127.16 Pa | 121.19 Pa | 101.78 Pa | 94.31 Pa |
| 在板上加载 (F) | 16.84 N | 16.24 N | 14.11 N | 12.32 N |
Application and Summary
本文的实验证明了压力和速度的相互作用, 通过将动压转化为静压来产生物体的载荷。这些概念是用平面射流撞击平板的两个不同角度和两个不同的流速来证明的。实验清楚地表明, 在停滞点的负载是最高的, 在那里所有的动态压力转换成静态压力, 其幅度随着从动态到静态的转换水平下降的位置远离停滞点。入射角的影响, 减少总负荷, 因为它转移的停滞压力, 从一个与中心线 (最大) 速度与流线承载较低的动态压力。
这些实验的目的还在于演示如何通过数值积分从压力水龙头获得的数据来确定接触到的物体的总载荷。此外, 还利用静压反向转化为动态压力, 对射流的速度和质量流量进行了估算。因此, 压力和速度的相互作用可以用于流量诊断。
在本实验中没有探讨的一个概念是用静力探针测速。这些探针直接测量了停滞和静压之间的差异, 这正是在方程式 (3) 中用来确定腔 contracta的速度的。注意, 至少在 90o角板中, 中央压力分路器直接暴露在停滞点, 使其成为一个皮托管探头。由于压力传感器比较每个压力抽头对接收器压力的压力, 因此结果是对的直接测量.  当这个测量在等式 (3) 的替换时, 结果是速度在停滞流线上的点在接近停滞点, 但仍然在它的影响半径之外。这种测量在这个实验中是有限的, 因为在停滞流线上的那个点的确切位置是未知的。
当这个测量在等式 (3) 的替换时, 结果是速度在停滞流线上的点在接近停滞点, 但仍然在它的影响半径之外。这种测量在这个实验中是有限的, 因为在停滞流线上的那个点的确切位置是未知的。
如前所述, 压力测量可用于确定流速。在本文所描述的应用中, 在压力和接收器之间的变化足以估计在腔 contracta的平均速度。还有人提到, 顺便提一下, 与停滞点重合的压力抽头是一个皮托管, 它可以与探针感应静态压力来确定流速的公式 (3) (替代使用和与).  事实上, 一个单一的设备组合的皮托管探针和静态探头, 称为普朗特管, 可能是最广泛的诊断设备的流体工程测量速度。如图5所示, 该探头由两个同心管组成。内部管面的流量, 以检测停滞压力, 外管有一组侧面端口, 感觉到静态压力。传感器, 如压力传感器或液体柱压表, 用来确定这两个压力之间的差异, 以估计的速度从方程 (3) (再次, 以与和与). 像这样的探针, 或者是一个皮托管和一个独立的静态探头的组合, 实际上是用在飞机上, 来确定相对于飞机的风速。
事实上, 一个单一的设备组合的皮托管探针和静态探头, 称为普朗特管, 可能是最广泛的诊断设备的流体工程测量速度。如图5所示, 该探头由两个同心管组成。内部管面的流量, 以检测停滞压力, 外管有一组侧面端口, 感觉到静态压力。传感器, 如压力传感器或液体柱压表, 用来确定这两个压力之间的差异, 以估计的速度从方程 (3) (再次, 以与和与). 像这样的探针, 或者是一个皮托管和一个独立的静态探头的组合, 实际上是用在飞机上, 来确定相对于飞机的风速。
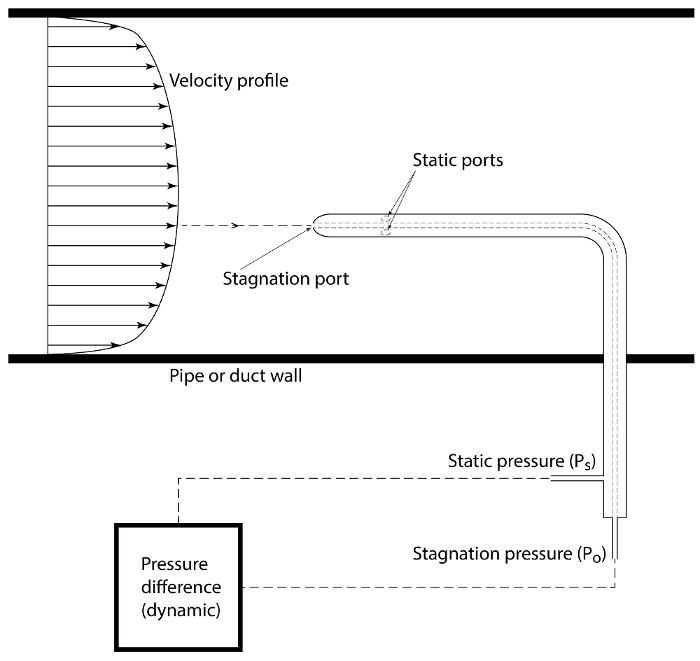
图5.流动测速仪用静力 (或普朗特) 探针确定基于动压的速度分布。这个探针横跨流场被遍历, 以确定不同位置的速度。请单击此处查看此图的较大版本.
Tags
跳至...
此集合中的视频:

Now Playing
射流撞击斜面板
Mechanical Engineering
10.8K Views

浮力和拖曳在浸没的身体
Mechanical Engineering
30.2K Views

浮动容器的稳定性
Mechanical Engineering
23.1K Views

推进力和推力
Mechanical Engineering
22.1K Views

管道网络和压力损失
Mechanical Engineering
58.7K Views

淬火和沸腾
Mechanical Engineering
8.1K Views

液压跳跃
Mechanical Engineering
41.3K Views

换热器分析
Mechanical Engineering
28.3K Views

制冷概论
Mechanical Engineering
25.0K Views

热丝测速
Mechanical Engineering
15.8K Views

测量紊流
Mechanical Engineering
13.6K Views

通过钝体流的可视化
Mechanical Engineering
12.1K Views

系统分析中的能量守恒方法
Mechanical Engineering
7.4K Views

质量守恒和流速测量
Mechanical Engineering
22.9K Views

用控制容积法测定扁板的撞击力
Mechanical Engineering
26.0K Views
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。